Rangkuman Paper ke-2
1.1 Judul: Perancangan Wahana Terbang
Empat Axis Berbasis Kontrol Android
1.2 Pendahuluan
Semakin popular wahana terbang dimasyarakat
yang mayoritas menggunakan Remote Control dengan radio frequency. Pada dasarnya
ada banyak tipe remote control yang digunakan, yang paling banyak digunakan
ialah remote control bergangang seperti
pistol. Tipe ini digunakan karena cara pengoperasian menggunakan handheld yang nyaman dan cukup mudah dalam melakukan control. Namun range
jangkauannya relative pendek dan pada system control hanya ada dua kondisi
yakni ‘on’ dan ‘off’ baik untuk manuever vertical maupun horizontal.
1.3 Pendahuluan Wahana Terbang Empat
Axis
Pesawat empat sumbu
menggunakan firmware open source MWC untuk papan kontrol penerbangan, dan
sensor tekanan digital BMP085, MPU6050 digital tiga sumbu akselerometer dan
tiga sensor gyro sumbu dan HMC5883L tiga sumbu sensor magnetoresistif digital,
dapat membantu menentukan sensor pesawat empat sumbu, dan dapat menyesuaikan
1.4 Pendahuluan algoritma control
Jika giroskop atau
akselerometer digunakan sendiri untuk mendeteksi sikap penerbangan, tidak
mungkin menyediakan data yang dapat diandalkan untuk keseimbangan pesawat. Sesuai
dengan karakteristik keduanya, jika metode yang digunakan untuk menyaring, fusi
giroskop dan sinyal output akselerometer untuk mengkompensasi kesalahan
kumulatif, kesalahan drift gyro dan kesalahan dinamis dari sensor percepatan,
dapat membuat dua kalibrasi bersama, yang dapat memainkanJika giroskop atau
akselerometer digunakan sendiri untuk mendeteksi sikap penerbangan, tidak
mungkin menyediakan data yang dapat diandalkan untuk keseimbangan pesawat.
Sesuai dengan karakteristik keduanya, jika metode yang digunakan untuk
menyaring, fusi giroskop dan sinyal output akselerometer untuk mengkompensasi
kesalahan kumulatif, kesalahan drift gyro dan kesalahan dinamis dari sensor
percepatan, dapat membuat dua kalibrasi bersama, yang dapat memainkan
kelebihan, juga dapat menghindari kerugian mereka, sehingga pengukuran bisa
mendapatkan pendekatan yang lebih baik, sehingga pengukuran sikap lebih akurat
1.5 Desain Sistem
Desain menggunakan
ponsel Android sebagai remote control, melalui WiFi untuk mengirim instruksi
kontrol ke pesawat empat sumbu, untuk mencapai mengangkat, melempar, kemudi,
berputar dan postur terbang lainnya.Setelah mengatur koneksi WiFi dengan empat
sumbu, ponsel mengirim data kontrol yang relevan dengan menilai operasi gerakan
pengguna.
1.1.1
Software
desain

1.1.1
Desain
Wahana Terbang

1.1 Kesimpulan
Pesawat empat sumbu yang dirancang
dalam makalah ini adalah pesawat portabel dengan volume kecil, yang didukung
oleh 4 motor brushless, dengan fleksibilitas dan fleksibilitas yang tinggi. Seluruh
mesin sepenuhnya elektronik stabil dan mudah dioperasikan. Ini memiliki
berbagai aplikasi di berbagai bidang. Sistem kontrol penerbangan pesawat empat
sumbu berdasarkan desain Android dalam tulisan ini, ponsel Android terhubung
dengan empat pesawat sumbu dengan meluncurkan empat pesawat wifi, off pengguna
dengan App yang sesuai dapat mengontrol pesawat empat sumbu, pendaratan dan
perubahan sikap lainnya. Tidak hanya operasi sederhana, tetapi juga
menghilangkan remote control nirkabel genggam tradisional, meningkatkan
pengalaman operasi pengguna.
2.1
Judul: IMPLEMENTASI SENSOR BMP085 PADA QUADCOPTER BERBASIS
MIKROKONTROLER
2.2 Abstrak
Sensor BMP085 adalah sensor untuk mengukur
tekanan udara (barometer) dengan nilai output berupa satuan Pa (pascal). Dengan
memanfaatkan tekanan udara berdasar ketinggian terhadap permukaan laut, maka
sensor ini juga dapat mengukur ketinggian (altimeter). Sensor BMP085 ini
mendeteksi ketinggian obyek dengan cara memanfaatkan tekanan udara saat berada
di atas udara dalam suatu wilayah tertentu. Jadi semakin tinggi suatu tempat
maka semakin sedikit jumlah udara di atasnya dan menjadikan tekanan udara
menjadi sedikit.Dari nilai tekanan udara itulah sensor dapat mengukur
ketinggian secara akurat.Dengan perkembangan teknologi yang semakin pesat ini
dijadikan penelitian alat dengan judul “Implementasi Sensor BMP085 Pada
Quadcopter Berbasis Mikrokontroler”.Agar pengguna dapat mengerti berapa
ketinggian yang sudah dicapai oleh quadcopter.Alat ini beroperasi dengan menggunakan
sensor bmp085 yang pengukurannya dengan mengambil nilai tekanan udara lalu
dihitung menjadi nilai ketinggian dan menggunakan mikrokontroler sebagai otak
pemrograman. Dengan memberikan data output berupa tampilan nilai hasil
pengukuran dari sensor BMP085 pada laptop, menggunakan bluetooth module yang
fungsinya sebagai media komunikasi quadcopter saat proses terbang. Sehingga
pengguna dapat mengerti batas nilai ketinggian,karena remote yang digunakan
mempunyai batas jarak sendiri saat beroperasi terbang ada quadcopter.Juga dapat
mencegah terjadi kesalahan seperti lost of control saat pengoperasian.
2.3 Tinjauan Pustaka
Quadcopter adalah salah satu jenis robot yang
sedang pesat perkembangannya.Quadcopteradalah robot terbang yang sering disebut
sebagai pesawat tanpa awak atau UAV (Unmanned Aerial Vehicle).UAV sendiri
terdiri dari beberapa jenis yang paling populer sekarang ini adalah quadcpoter
(atau kadang disebut dengan sebutan quadrotor), yang merupakan multicopter
yangmemiliki empat rotor.Quadcopter ini dapat diterbangkan dengan dua cara
yaitu terbang dengan cara dikontrol atau dengan terbang otomatis.
A. Motor Brushless
Motor brushless merupakan perangkat
elektromagnetis yang mengubah energi listrik menjadi energi mekanik. Energi
mekanik ini, misalnya digambarkan memutar propeller.Motor jenis ini mempunyai
permanen magnet pada bagian “rotor” sedangkan elektro-magnetpada bagian
“stator”-nya
B. Electronic Speed Control
Sebuah modul rangkaian elektronik yang
berfungsi untuk mengatur putaran motordengan mengatur suplai arus yang
disesuaikan dengan kebutuhan motor brushless. ESC memegang peranan penting
dalam proses pengendali kecepatan dan arah putar, pemilihan ESC tergantung dari
besar arus maksimal motor.
C. Propeller
Pemilihan propeller disesuaikan dengan
rekomendasi dari spesifikasi motor brushless tersebut. Kesalahan pemilihan
berdampak besar terhadap trust yang dihasilkan oleh motor. Yang perlu
diperhatikan juga adalah pemilihan ukuran propeller dan disesuaikan pula dengan
dimensi quadcopter.
D. Flight Control
Flight Control adalah termasuk salah satu
komponen yang penting untuk membuat quadcopter.Flight Control sendiri adalah
alat untuk memproses perintah yang diberikan melalui remot control.
E. Frame
Frame sendiri adalah tempat untuk menaruh atau
menggabungkan semua komponen quadcopter menjadi satu yang berisikan motor, esc
receiver, dan flight controler.
F. Baterry 4 cells
Battery 4 cell dengan model LIPO ini kebanyakan
digunakan hampir semua jenis quadcopter / UFO / RC drone. LIPO itu sendiri yang
berarti lithium-ion polymer.Kapasitasnya dimulai dari 100 mAh untuk quadcopter
yang berukuran nano, 380 mAh untuk quadcopter ukuran mikro, 2200 mAh yang saya
gunakan pada penelitian ini, namun untuk kapasitas yang lebih dari 8000 mAh.
G. Remote Control
Cara kerja seperti ini mirip dengan cara kerja
sandi morse yang dikirim melalui mesin telegraf. Seorang operator pengirim
mengirimkan pesan teks singkat kepada operator penerima yang berada pada jarak
tertentu. Namun pesan tersebut dikirimkan dalam bentuk pola kode-kode morse
yang melambangkan huruf-huruf dalam pesan yang dikirimkan. Mesin telegraf
menggunakan kode tertentu karena tidak dapat mengirimkan arus listrik yang
terhubung ke sebuah bel pada bagian penerima, sehingga operator penerima akan
menerima suara dari bel dalam pola-pola tertentu yang apabila dirangkai akan
dapat diterjemahkan sebagai pesan singkat.
Remote control menggunakan LED ( Light Emiting
Diode ) inframerah yang berfungsi sebagai pengirim ( Transmitter ) pola sinar
infra merah. LED inframerah adalah jenis lampu kecil yang memiliki diode yang
akan memancarkan cahaya inframerah apabila di beri arus.
H. Mikrokontroler Arduino
Arduino merupakan sistem mikrokontroler yang
relatif mudah dan cepat dalam membuat aplikasi elektronika maupun robotika..
Arduino memiliki software dan hardware, kebanyakan papan arduino memiliki
regulator linear 5 volt dan 16 MHz osilator kristal (atau resonator keramik
dalam beberapa varian).
Arduino diciptakan untuk para pemula bahkan
yang tidak memiliki dasar bahasa pemrograman sama sekali karena menggunakan
bahasa C++ yang telah dipermudah melalui library.
I. Sensor BMP085
BMP085 adalah sensor untuk mengukur tekanan
udara (barometer) dengan nilai output berupa satuan Pa (Pascal). Dengan
memanfaatkan tekanan udara berdasar ketinggian terhadap permukaan laut, maka
sensor ini juga dapat mengukur ketinggian (altimeter).Sensor BMP085 ini
mendeteksi ketinggian obyek dengan cara memanfaatkan tekanan udara saat berada
di atas udara dalam suatu wilayah tertentu. Jadi semakin tinggi suatu tempat
maka semakin sedikit jumlah udara diatasnya dan menjadikan tekanan udara
menjadi sedikit.
J. Bluetooth Modul HC-05
Bluetooth modul HC-05 ini adalah versi
pengembangan lanjutan dari bluetooth modul HC-06.Pada dasarnya bluetooth modul
ini dibagi menjadi 2 macam yaitu bluetooth serial bernomor ganjil dengan
bluetooth serial bernomor genap.Contoh dari bluetooth serial bernomor ganjil itu
seperti HC-05 dan HC-03, sedangkan yang bluetooth serial bernomor genap seperti
HC-06 dengan HC-04.
2.3. METODOLOGI PENELITIAN
A. Eksperimen
Metode yang digunakan peneliti adalah merancang
sebuah perangkat keras yang dapat mengukur ketinggian dengan menggunakan sensor
BMP085 (baromatic meter pressure) memanfaatkan mikrokontroler arduino dan melakukan
percobaan dengan tujuan untuk mengetahui apakah alat berfungsi sesuai atau tidak.
B. Blok Diagram

2.4 Implementasi dan Pengujian
2.5. PENUTUP
A. Kesimpulan
Setelah melakukan pengujian terhadap alat maka
dapat disimpulkan bahwa :
1. Pengujian terhadap sensor BMP085
menghasilkan nilai tekanan udara, dikarenakan sistem kerja utama dari sensor
BMP085 adalah pengukuran tekanan suhu udara. Dengan hal itu juga sensor BMP085
ini pun bisa mengukur ketinggian dengan mengkonversi nilai tekanan udara yang
bersatuan pascal (Pa) menjadi nilai ketinggian. Karena semakin
kecil nilai tekanan udara maka ketinggian
itupun semakin tinggi.
2. Program yang diuji pada arduino uno berjalan
dengan baik sehingga dalam proyek alat yang lain bisa berjalan sesuai dengan
yang direncanakan. Pengoperasian menggunakan Bluetooth modul sebagai media
transfer datanya berhasil denganbaik. Sehingga membuat alat pengukur ketinggian
ini bisa diuji coba pada quadcopter.
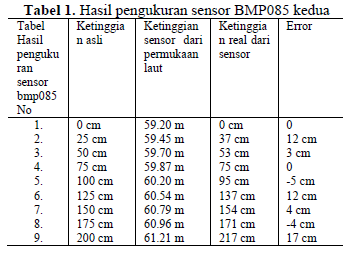
3. Jarak ketinggian yang dihasilkan oleh sensor
dari nilai tekanan udara yaitu berupa nilai ketinggian dari atas permukaan laut
sehingga saat percobaan pada daratan dengan jarak 0 cm maka hasil pengukurannya
berbeda yaitu lebih tinggi. Oleh karena itu dibuat variabel sendiri untuk
mendapatkan nilai ketinggian dari atas permukaan darat.
4. Output tampilan nilai ketinggian ini
menggunakan aplikasi bluetooth terminal pada handphone android. Yaitu dengan
cara mengunduh aplikasinya pada playstore, setelah selesai maka buka dan
connect-kan bluetooth android dengan bluetooth modul pada arduino maka langsung
akan muncul tampilan nilai ketinggiannya itusendiri.
B. Saran
1. Karena masih berupa alat pertama menggunakan
sensor BMP085 maka bisa diharapkan untuk mendapatkan hasil nilai ketinggian
dari permukaan laut lebih baik lagi dengan mempelajari coding sensor lebih
mendalam.
2. Karena menggunakan Bluetooth modul yaitu dapat
beroperasi dalam jarak tertentu karena Bluetooth modul mempunyai jarak
tersendiri sehingga membuat saat pemasangan pada quadcopter tidak dapat terbang
lebih jauh atau lebih tinggi.
3. Untuk mengembangkan lagi penelitian ini di
sarankan menggunakan wifi modul agar lebih baik dan jangkauannya lebih luas.
Agar saat pengoperasian pada quadcopter outputtampilan ketinggianbias mengukur
lebih tinggi dan jauh dengan menggunakan wifi modul.
Komentar
Posting Komentar